 Jazz trash robot is old concept, originally we developed it as a proposal for Artbots competition back in 2008. We wanted to challenge the robot concept, as something hightech and intelligent, and push lo-tech low tech elektromechanic model throught..
Jazz trash robot is old concept, originally we developed it as a proposal for Artbots competition back in 2008. We wanted to challenge the robot concept, as something hightech and intelligent, and push lo-tech low tech elektromechanic model throught..They did not choose Jazz trash robot to the artbots, but it did appear in several of our own exhibitions and events.
 Jaz trash robot at Artlab Gallery 2008
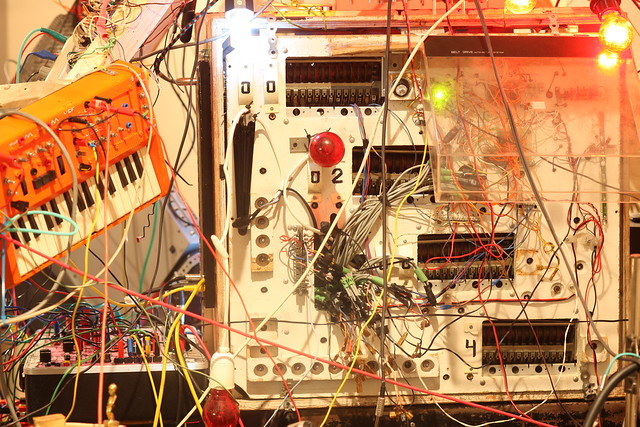
Jaz trash robot at Artlab Gallery 2008Original robot had massive amount of mechanical sequencers, some timers, oscillator, 24 in/24 out patchay and a keyboard that it was hardwired to play.
Old description text I found says: "We designed this project originally to help us synchronize the koelse.org equipment. Our aim was to get one step towards the discomusic from the complitely uncontrolled noise we usyally play. Well now that we started actually making this, it seems obvious that this device will make everything rather more complicated and less controllable, but if we are lucky it will play us some discomusic. Basically it is not an actual sequencer, but more like a mechanical signalcutting device. It has 24 inputs and 24 outputs. When you patch an instrument throught the device it will be cut in the sequenses determined by the mechanical sequencers. Our aim is also to build some kind of a robot, a system tha is complex enought to produce surpricing and rich soundscape. Connected with the rest of our experimental instruments it is supposed to form a selfsustaining soundproduction enviroment. "

Vaasankatu center of contemporary art 2008
So Jazz Trash Robot was an important step towards more seqenced, and organized form of producing sounds, even thought it did not help much in practice since it was rather chaotic and complicated machine.
Eventually it broke down and since it was a 230v device we had to rebuild it for for our exhibition in Pori.
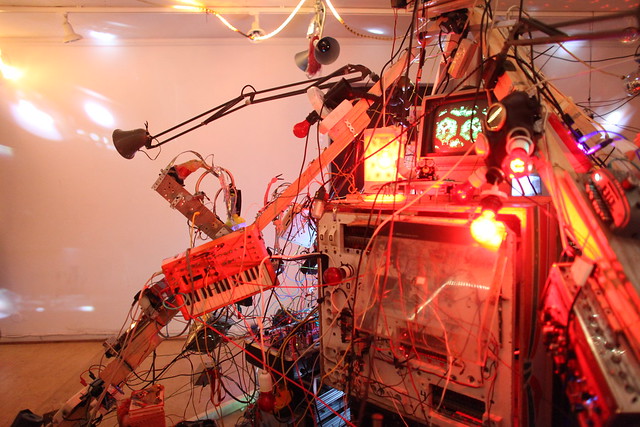
Now Jazz Trash Robot has external sync, so it can be synchronized with other equipment.
Ei kommentteja:
Lähetä kommentti